




1/6
rc_visard
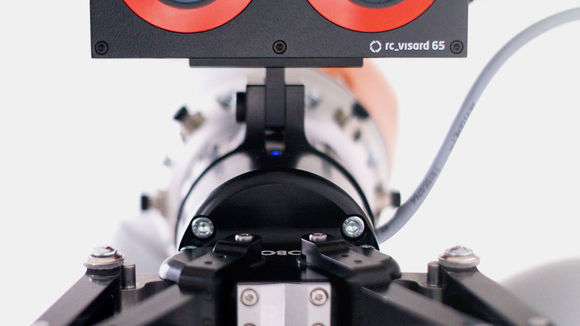
The rc_visard is the first industrial-grade 3D Camera which, thanks to a fusion of inertial and visual information, provides ego-motion and depth data in real time. Both versions of the rc_visard allow seamless integration in applications ranging from indoor localization and mobile navigation to robotic grasping and manipulation. The onboard computation and communication interfaces simplify connection to existing systems. The rc_visard includes a highly intuitive interface for setup, parametrization and programming, hence expert knowledge is not required for its operation.
发布于2019-11-28
设计公司
Tilo Wüsthoff Industrial Design
设计师
Tilo Wüsthoff
设计奖项
德国iF设计奖
iF DESIGN AWARD/iF设计奖
2018 年
颜色
相关推荐
