



1/6
PGC Series Gripper
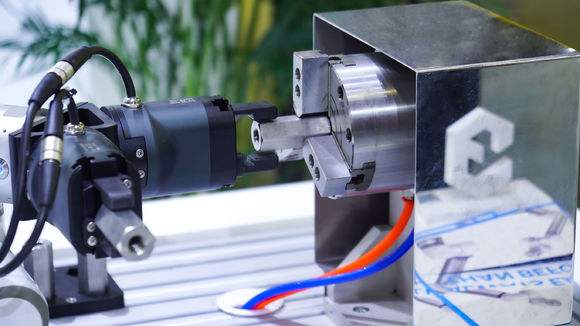
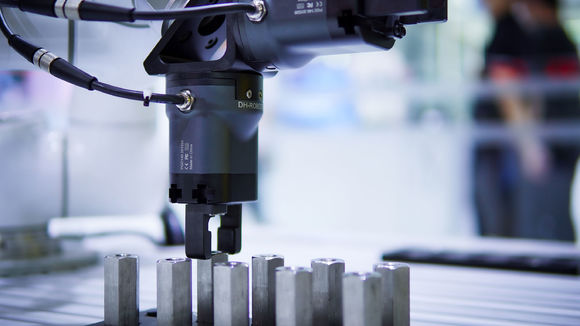
PGC series grippers are adaptive end-effectors for collaborative robots. Their rounded appearance and safety features reduce the risk of injury during operation compared to the traditional gripper. Precise force/position control and high durability mean that the gripper can adapt to various application environments. Integrated drive and control, a clear graphical user interface, and no extra accessories enhance superior usability.
发布于2021-08-04
设计公司
DH-Robotics Technology Co., Ltd.
设计师
Dizhou Luo
设计奖项
德国iF设计奖
iF DESIGN AWARD/iF设计奖
2021 年
